
Secuencia de descenso de Schiaparelli en la misión ExoMars 2016. Créditos: ESA/ATG medialab
Marte lleva años maravillándonos y sirviendo de inspiración tanto para la especulación científica como para la imaginación literaria.
Desde los albores de la era espacial, los países líderes en la exploración del cosmos han intentando aprovechar las últimas tecnologías para desvelar los misterios de Marte, observando el planeta desde las alturas y enviando robots a su polvorienta superficie.
Desde principios de los años sesenta del siglo pasado, se han enviado más de 40 misiones al Planeta Rojo. Siguiendo la secuencia habitual de complejidad creciente, los primeros intentos de estudiar el planeta consistieron en sobrevuelos relativamente sencillos y muy breves. Después llegaron los satélites, con instrumentos más sofisticados para cartografiar la totalidad del planeta y caracterizar sus distintos paisajes.
Desde los albores de la era espacial, los países líderes en la exploración del cosmos han intentando aprovechar las últimas tecnologías para desvelar los misterios de Marte, observando el planeta desde las alturas y enviando robots a su polvorienta superficie.
Desde principios de los años sesenta del siglo pasado, se han enviado más de 40 misiones al Planeta Rojo. Siguiendo la secuencia habitual de complejidad creciente, los primeros intentos de estudiar el planeta consistieron en sobrevuelos relativamente sencillos y muy breves. Después llegaron los satélites, con instrumentos más sofisticados para cartografiar la totalidad del planeta y caracterizar sus distintos paisajes.

Réplica (1:1) del módulo de
descenso de Mars 3 en el Museo Memorial de los Cosmonautas en Moscú,
Rusia. Obra personal de Armael [CC0], a través de Wikimedia Commons
Otros intentos posteriores por parte de la Unión Soviética, en 1971 y 1973, también acabaron en fracaso (o en éxito parcial): la sonda Mars 2 se estrelló contra la superficie de Marte tras entrar en su atmósfera en un ángulo demasiado inclinado, mientras que Mars 3 obtuvo 20 segundos de datos de la superficie antes de perecer. Mars 6 consiguió algunos datos de utilidad durante su entrada en la atmósfera marciana y su descenso en 1974, pero la señal se perdió justo antes del aterrizaje. Por su parte, Mars 7 se desvió del planeta unos 1.300 km debido a problemas electrónicos que le impidieron adquirir la trayectoria correcta.
Hubo que esperar a la llegada de las sondas estadounidenses Viking 1 el 20 de julio de 1976 y de Viking 2 el 3 de septiembre de ese mismo año para lograr aterrizar con éxito en el Planeta Rojo. Desde entonces, se han producido otros cinco aterrizajes exitosos en Marte, todos ellos con naves estadounidenses, además de varios intentos fallidos. Con el lanzamiento de ExoMars 2016, la ESA ahora quiere sumarse a la NASA y convertirse la segunda potencia espacial en enviar un módulo de aterrizaje y completar con éxito una misión sobre la superficie del Planeta Rojo.

Maqueta de la sonda de aterrizaje Viking. Créditos: NASA/JPL-Caltech/University of Arizona
El primer problema al que se enfrentan es cómo lograr una navegación precisa. Las ventanas de lanzamiento se producen cada 26 meses aproximadamente, cuando la Tierra y Marte se encuentran relativamente cerca en sus órbitas. Una vez que la nave está en camino hacia Marte, el trayecto suele durar unos 6 meses.
Asumiendo que su trayectoria se cruce con la órbita del planeta en el momento apropiado, la nave podrá iniciar la fase de entrada atmosférica y descenso. La mayoría de módulos de aterrizaje —incluido el módulo demostrador de entrada, descenso y aterrizaje Schiaparelli de la misión ExoMars 2016— llevan a cabo una entrada balística a gran velocidad en la atmósfera.

Imagen de Viking 2 desde la superficie de Marte. Créditos: NASA/JPL
El ángulo de entrada es fundamental: si es demasiado inclinado, la nave podría sobrecalentarse y desintegrarse; si su inclinación es insuficiente, podría rebotar en la atmósfera y perderse en el espacio.
Toda la secuencia de control de entrada atmosférica y descenso se programa previamente en el ordenador de la nave, ya que no hay tiempo de enviarle comandos una vez que comienza la fase final del vuelo. No obstante, esta secuencia no siempre sale como se había previsto. En el caso de la sonda Mars Polar Lander de la NASA, parece que los retrocohetes se apagaron demasiado pronto, haciendo que la nave se estrellara contra el suelo.
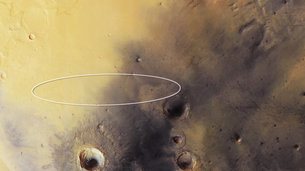
Lugar de aterrizaje de Schiaparelli en la misión ExoMars 2016. Créditos: IRSPS/TAS-I
Con una velocidad de entrada a la alta atmósfera de casi 21.600 km/h (6 km/s), una nave suele tardar de 6 a 7 minutos en alcanzar la superficie. En primer lugar, la nave tiene que soportar de 2 a 3 minutos de calor extremo, provocado por la fricción atmosférica. Protegida por su escudo térmico, tendrá que resistir temperaturas de varios miles de grados Celsius y el azote de las ondas de choque atmosféricas.
La nave decelerará rápidamente y, cuando haya llegado a unos 1.700 km/h (0,47 km/s) y a una altitud de 10 km aproximadamente, podrá desplegar su paracaídas supersónico. Poco después, la velocidad habrá descendido lo suficiente como para que el escudo térmico se desprenda.
En la mayoría de misiones se utiliza un radar para medir la altitud (y, en ocasiones, también la velocidad relativa a la superficie) y así decidir cuándo ordenar a los propulsores o retrocohetes que reduzcan la velocidad de descenso a unos pocos metros por segundo. Sin embargo, la delgada atmósfera marciana hace que esto sea muy difícil de lograrse solo con un paracaídas.
El procedimiento adoptado durante la fase final del descenso varía según el tamaño y la complejidad del módulo de aterrizaje. Los exitosos Viking, cada uno de 600 kg de peso, mantuvieron encendidos 3 motores de propulsión variable durante los últimos 1.200 m de su descenso. Schiaparelli también frenará su descenso mediante el encendido de sus propulsores, para después efectuar una breve caída libre sobre la superficie una vez apagados los motores.

Bolsas de aire de la misión Mars Pathfinder. Créditos: NASA
Los robots del programa Mars Exploration Rover, que llegaron al planeta en 2004, empleaban un sistema similar de paracaídas, retrocohetes y bolsas de aire. Por su parte, se cree que la sonda Beagle 2, concebida y construida en Gran Bretaña y que también incorporaba bolsas de aire, pero no propulsores, aterrizó en Marte pero fue incapaz de comunicarse con la Tierra, ya que algunos de sus ‘pétalos’ no consiguieron abrirse.
El mayor módulo de aterrizaje construido hasta el momento fue el Mars Science Laboratory (MSL), que depositó el vehículo explorador Curiosity en el cráter Gale en agosto de 2012. El MSL pesaba unos 900 kg y medía 3 m de longitud, por lo que no resultaba viable utilizar un sistema de bolsas de aire, que se sustituyó por un nuevo tipo de ‘grúa’. Aunque el equipo de la misión no había podido probar esta tecnología como sistema integrado antes del lanzamiento, el MSL funcionó a la perfección.
La nave fue capaz de modificar su rumbo de forma autónoma durante la entrada a la atmósfera de Marte mediante una serie de maniobras en ese, similares a las que realizan los astronautas que pilotan los transbordadores de la NASA. Durante los 3 minutos anteriores al impacto, la nave frenó su descenso con un paracaídas, para luego encender los retrocohetes montados alrededor de su etapa superior. En los últimos segundos, esta etapa funcionó como grúa, descendiendo el vehículo en vertical con un cable para que aterrizase sobre sus ruedas.
 Aterrizaje del robot Curiosity, por debajo de la etapa de descenso que funcionó como grúa. Créditos: NASA/JPL-Caltech
Aterrizaje del robot Curiosity, por debajo de la etapa de descenso que funcionó como grúa. Créditos: NASA/JPL-CaltechDesde entonces, numerosas naves orbitales han cartografiado con todo detalle el planeta, por lo que ahora hay dos objetivos fundamentales: el interés científico del lugar y la relativa seguridad del terreno. Mars Pathfinder, por ejemplo, se posó sobre un antiguo lecho fluvial, mientras que los vehículos de las misiones Exploration Rover y MSL aterrizaron en lugares en los que se creía que podía haber habido agua superficial y entornos potencialmente habitables.
No obstante, el mapa de los puntos de aterrizaje en Marte muestra que, hasta el momento, se ha evitado la mitad del planeta. No es casualidad que todos los aterrizajes de éxito en Marte hayan tenido lugar en una región predominantemente llana y no en zonas más escarpadas, como las altiplanicies llenas de cráteres al sur del ecuador. Aunque las llanuras cerca del ecuador y en el norte a menudo presentan pequeños cráteres de impacto, rocas de distinto tamaño y dunas de polvo, la probabilidad de que se produzcan daños al aterrizar es bastante pequeña.

Puntos de aterrizaje en Marte. Créditos: imagen de fondo: MOLA Science Team; mapa: ESA
Otro factor que afecta a la elección del lugar de aterrizaje es el espesor de la atmósfera marciana. En la Tierra, una nave puede atravesar en paracaídas o planeando el denso manto de aire al finalizar su misión orbital. En cambio, la atmósfera de Marte es 150 veces menos densa que la de nuestro planeta, y la presión del aire cambia un 20% entre estaciones. La presión en la superficie es mayor sobre sus profundos cañones y menor por encima de sus gigantescos volcanes.
Así, no es de extrañar que los planificadores de las misiones hayan optado por dirigir las naves a las zonas bajas, donde la mayor profundidad y espesor de la atmósfera facilita la fricción atmosférica y permite que los paracaídas frenen al máximo el descenso de las naves.
Las misiones ExoMars de la ESA no son una excepción. Schiaparelli se dirigirá a Meridiani Planum, una región relativamente llana y lisa cerca del ecuador marciano y bastante próxima a la ubicación actual del robot Opportunity de la NASA. En estos momentos se están estudiando tres lugares cerca del ecuador con vistas a la misión ExoMars 2020, que llevará a Marte el primer rover planetario de la ESA.

Desde la llegada del Pathfinder a Marte en 1997, casi todos los módulos de aterrizaje y robots exploradores se han alimentado mediante paneles solares. Schiaparelli es excepcional, ya que solo monta baterías no recargables, por lo que su actividad se verá limitada a unos pocos días marcianos. Esto se debe a que su objetivo principal es demostrar las tecnologías de entrada, descenso y aterrizaje. La otra excepción es el MSL, alimentado por energía nuclear, que es capaz de funcionar independientemente de la luz solar recibida.
El éxito y la duración de las misiones alimentadas por radiación solar dependen de la disponibilidad de luz para iluminar los paneles.
Como Marte presenta unas estaciones y periodos de luz diurna similares a los de la Tierra, la potencia de los módulos de aterrizaje debe gestionarse con gran cuidado para que puedan sobrevivir los días invernales, más cortos. Este es otro motivo para que se posen cerca del ecuador. Los vehículos exploradores móviles presentan la ventaja de que pueden estacionarse en un punto relativamente soleado para que sus baterías puedan recargarse.
Por otro lado, la acumulación de polvo en los paneles puede reducir el rendimiento eléctrico del vehículo, aunque las ráfagas de viento ocasionales pueden barrer gran parte del polvo depositado. Si bien ExoMars 2020 llegará al Planeta Rojo fuera de la principal temporada de tormentas de polvo, el equipo de la misión es consciente de que tanto el módulo de aterrizaje como el robot explorador podrían tener que cesar sus operaciones si el polvo oscureciese el cielo.
El éxito y la duración de las misiones alimentadas por radiación solar dependen de la disponibilidad de luz para iluminar los paneles.
Como Marte presenta unas estaciones y periodos de luz diurna similares a los de la Tierra, la potencia de los módulos de aterrizaje debe gestionarse con gran cuidado para que puedan sobrevivir los días invernales, más cortos. Este es otro motivo para que se posen cerca del ecuador. Los vehículos exploradores móviles presentan la ventaja de que pueden estacionarse en un punto relativamente soleado para que sus baterías puedan recargarse.
Por otro lado, la acumulación de polvo en los paneles puede reducir el rendimiento eléctrico del vehículo, aunque las ráfagas de viento ocasionales pueden barrer gran parte del polvo depositado. Si bien ExoMars 2020 llegará al Planeta Rojo fuera de la principal temporada de tormentas de polvo, el equipo de la misión es consciente de que tanto el módulo de aterrizaje como el robot explorador podrían tener que cesar sus operaciones si el polvo oscureciese el cielo.
No hay comentarios:
Publicar un comentario